Investigadores del Departamento de Ingeniería Biomédica de la Universidad de Basilea han desarrollado un robot dental de tamaño reducido destinado a automatizar la preparación de dientes que requieren una corona. El dispositivo, todavía en fase experimental, podría transformar una parte habitual de los tratamientos restauradores y disminuir el número de citas necesarias para completar el procedimiento.
El nuevo sistema pretende acortar el recorrido clínico habitual de retirada de tejido afectado, reconstrucción, talla de la pieza, impresión o escaneado, provisional y fabricación de prótesis definitiva. Ahora, tras obtener un escaneado digital durante la primera consulta, el profesional podría planificar de forma precisa la cantidad de tejido que debe retirarse y solicitar la fabricación de la corona desde ese mismo momento. A continuación, el robot ejecutaría el tallado siguiendo el diseño previamente establecido.
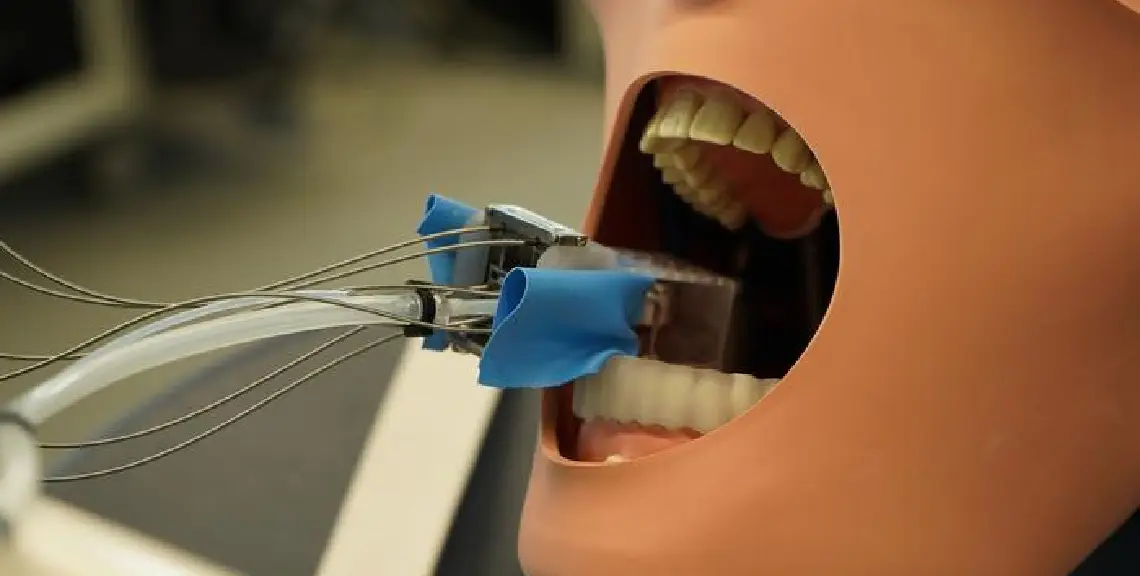
El prototipo recibe el nombre de MIR, siglas de Miniature Intraoral Robot. Sus dimensiones, de 43 milímetros de largo, 26 de ancho y 28 de alto, son comparables a las de un tapón de corcho de una botella de vino. Los motores y el sistema de control permanecen fuera de la boca y se conectan al robot mediante ejes flexibles, cables y conductos, una configuración que facilita la miniaturización del conjunto.
Según explica la investigadora Yukiko Tomooka, autora principal del estudio publicado en la revista IEEE Transactions on Medical Robotics and Bionics, el objetivo era diseñar un equipo suficientemente pequeño para trabajar con comodidad dentro de la cavidad oral sin interferir con el acceso clínico ni con la posición del paciente.
El procedimiento contempla también la fabricación de una férula individualizada mediante impresión tridimensional. El robot se fija a esta estructura, adaptada a la anatomía del paciente, de modo que cualquier movimiento de la cabeza se reproduce de manera simultánea en el dispositivo. Esta solución busca mantener la referencia espacial durante todo el tratamiento.
Las pruebas iniciales se realizaron sobre modelos dentales fabricados con resinas sintéticas y sobre materiales cerámicos con una dureza semejante a la del esmalte humano. El tallado se lleva a cabo en dos etapas diferenciadas. En primer lugar, una fresa de mayor diámetro elimina tejido desde la superficie superior del diente. Posteriormente, otra herramienta más fina y alargada actúa sobre las paredes laterales para completar la preparación.
Uno de los aspectos que más ha llamado la atención del equipo investigador es el grado de precisión alcanzado pese a que el prototipo todavía no incorpora sensores para corregir su posición en tiempo real. Durante los ensayos, el error registrado fue inferior a 0,2 milímetros, una cifra compatible con las exigencias habituales de muchos procedimientos restauradores.
Los investigadores también han analizado las fuerzas generadas durante el fresado. Los valores obtenidos se mantuvieron por debajo de cinco newtons. Paralelamente, el grupo estudia el nivel sonoro producido por el sistema para valorar su aceptación en el entorno clínico.
Antes de su llegada a las consultas será necesario completar nuevas etapas de desarrollo. Entre las próximas incorporaciones previstas figuran sensores y una cámara capaces de supervisar la posición del robot y el progreso del tratamiento. De esta manera, el sistema podría recuperar la referencia exacta incluso después de una interrupción del suministro eléctrico.
El proyecto ha contado con financiación de Innosuisse y con la colaboración del Centro de Odontología de la Universidad de Zúrich, la empresa Camlog Biotechnologies y la Universidad de Berna.